A plugin for Nautobot to easily onboard new devices.

Project description
Nautobot Device Onboarding plugin

A plugin for Nautobot to easily onboard new devices.
nautobot-device-onboarding is using Netmiko and
NAPALM to simplify the onboarding
process of a new device into Nautobot down to, in many cases, an IP Address and a site. In some cases, the user may also
have to specify a specific Device Platform and Device Port. Regardless, the Onboarding Plugin greatly simplifies the onboarding process
by allowing the user to specify a small amount of info and having the plugin populate a much larger amount of device data in Nautobot.
In most cases, the user would specify:
- Device Name
- Site
- Platform **
- Transport Port **
** Necessary for onboarding NXOS API, Arista EOS, or any other platform not using SSH as a transport
And the Onboarding Plugin would populate the following:
- Device Type (Model) - Creates if it does not exist
- Device Role - defaults to
network - Platform - Creates Cisco IOS, Cisco NXOS (ssh), and Junos Platforms if they do not exist
- Manufacturer - Creates Cisco/Juniper/Arista if it does not exist
- Management Interface
- Management Interface IP
- Serial Number (when available)
The goal of this plugin is not to import everything about a device into Nautobot. Rather, the goal is to quickly build an inventory of basic device data in Nautobot that provides basic info on how to access the devices. For example, getting the Management IP and Platform data into Nautobot allows a follow-on tool that uses the basic info to access each device, retrieve data, and then populate Nautobot with that data.
One example of a solution that can retrieve that additional device data and import it into Nautobot is the Network Importer. Other options would include an Ansible playbook or a Python script.
Installation
If using the installation pattern from the Nautobot Documentation, you will need sudo to the nautobot user before installing so that you install the package into the Nautobot virtual environment.
$ sudo -iu nautobot
The plugin is available as a Python package in PyPI and can be installed with pip3.
$ pip3 install nautobot-device-onboarding
Compatibility Matrix
| Nautobot 1.0 | |
|---|---|
| Device Onboarding plugin 1.0 | X |
To ensure Device Onboarding plugin is automatically re-installed during future upgrades, create a file named
local_requirements.txt (or append if it already exists) in the
NAUTOBOT_ROOT directory and list the nautobot-device-onboarding package:
$ echo nautobot-device-onboarding >> $NAUTOBOT_ROOT/local_requirements.txt
Nautobot Configuration
Enabling Plugin
Once installed, the plugin needs to be enabled in your nautobot_config.py
# In your nautobot_config.py
PLUGINS = ["nautobot_device_onboarding"]
Plugin Configuration Options
Although plugin can run without providing any settings, the plugin behavior can be controlled with the following list of settings defined in nautobot_config.py
create_platform_if_missingboolean (default True), If True, a new platform object will be created if the platform discovered by netmiko do not already exist and is in the list of supported platforms (cisco_ios,cisco_nxos,arista_eos,juniper_junos,cisco_xr)create_device_type_if_missingboolean (default True), If True, a new device type object will be created if the model discovered by Napalm do not match an existing device type.create_manufacturer_if_missingboolean (default True), If True, a new manufacturer object will be created if the manufacturer discovered by Napalm is do not match an existing manufacturer, this option is only valid ifcreate_device_type_if_missingis True as well.create_device_role_if_missingboolean (default True), If True, a new device role object will be created if the device role provided was not provided as part of the onboarding and if thedefault_device_roledo not already exist.create_management_interface_if_missingboolean (default True), If True, add management interface and IP address to the device. If False no management interfaces will be created, nor will the IP address be added to Nautobot, while the device will still get added.default_device_statusstring (default "Active"), status assigned to a new device by default.default_ip_statusstring (default "Active"), status assigned to a new device management IP.default_device_rolestring (default "network")default_device_role_colorstring (default FF0000), color assigned to the device role if it needs to be created.default_management_interfacestring (default "PLACEHOLDER"), name of the management interface that will be created, if one can't be identified on the device.default_management_prefix_lengthinteger ( default 0), length of the prefix that will be used for the management IP address, if the IP can't be found.skip_device_type_on_updateboolean (default False), If True, an existing Nautobot device will not get its device type updated. If False, device type will be updated with one discovered on a device.skip_manufacturer_on_updateboolean (default False), If True, an existing Nautobot device will not get its manufacturer updated. If False, manufacturer will be updated with one discovered on a device.platform_map(dictionary), mapping of an auto-detected Netmiko platform to the Nautobot slug name of your Platform. The dictionary should be in the format:{ <Netmiko Platform>: <Nautobot Slug> }
onboarding_extensions_map(dictionary), mapping of a NAPALM driver name to the loadable Python module used as an onboarding extension. The dictionary should be in the format:{ <Napalm Driver Name>: <Loadable Python Module> }
object_match_strategy(string), defines the method for searching models. There are currently two strategies, strict and loose. Strict has to be a direct match, normally using a slug. Loose allows a range of search criteria to match a single object. If multiple objects are returned an error is raised.
Modify nautobot_config.py with settings of your choice. Example settings are shown below:
# Example settings In your nautobot_config.py
PLUGINS_CONFIG = {
"nautobot_device_onboarding": {
"default_ip_status": "Active",
"default_device_role": "leaf",
"skip_device_type_on_update": True,
}
}
NAPALM Credentials
The Onboarding Plugin uses NAPALM. You can configure a default NAPALM username and password in nautobot_config.py.
When NAPALM_USERNAME and NAPALM_PASSWORD are configured in nautobot_config.py, the user does not have to
specify the Username and Password fields in the Device Onboarding Task, unless they wish to override the values in
nautobot_config.py:
# Credentials that Nautobot will uses to authenticate to devices when connecting via NAPALM.
NAPALM_USERNAME = "<napalm username>"
NAPALM_PASSWORD = "<napalm pwd>"
Final Configuration Steps
After installing the plugin and modifying nautobot_config.py, as the nautobot user, run the server migration:
$ nautobot-server migrate
Finally, as root, restart Nautobot and the Nautobot worker.
$ sudo systemctl restart nautobot nautobot-worker
Upgrades
When a new release comes out it may be necessary to run a migration of the database to account for any changes in the data models used by this plugin. Execute the command nautobot-server migrate from the Nautobot install nautobot/ directory after updating the package.
Usage
Preparation
To properly onboard a device, user needs to provide, at a minimum:
- The Device's Site
- The Device's primary IP address or DNS Name
For DNS Name Resolution to work, the instance of Nautobot must be able to resolve the name of the device to IP address.
If other attributes (Platform, Device Type, Device Role) are provided in the onboarding task, the plugin will use provided value for the onboarded device.
If Platform, Device Type and/or Device Role are not provided, the plugin will try to identify these information automatically and, based on the settings, it can create them in Nautobot as needed.
If the Platform is provided, it must point to an existing Nautobot Platform. NAPALM driver of this platform will be used only if it is defined for the platform in Nautobot. To use a preferred NAPALM driver, either define it in Nautobot per platform or in the plugins settings under
platform_map
SSH Autodetect
Plugin recognizes platform types with a Netmiko SSH Autodetect mechanism. The user will need to specify additional information for platforms where Netmiko's ssh_autodetect feature does not work.
Here is the list of platforms supported by ssh_autodetect.
The nautobot-device-onboarding plugin can be used with any devices that are supported by NAPALM. Even custom NAPALM driver plugins can be used with a bit of effort.
Devices that are supported by NAPALM but are not running SSH or don't have support for ssh_autodetect will still work with this plugin, but will require some additional information in the onboarding task.
The table below shows which common platforms will be SSH auto-detected by default.
| Platform | Platform Autodetect |
|---|---|
| Juniper/Junos | Yes (when running Netconf over SSH) |
| Cisco IOS-XE | Yes |
| Cisco NXOS (ssh) | Yes |
| Cisco NXOS (nxapi) | No |
| Arista EOS | No |
For the platforms where SSH auto-detection does not work, the user will need to:
- Manually define a Platform in Nautobot (this will be a one-time task in order to support any number of devices using this Platform)
- During onboarding, a Port and Platform must explicitly be specified (in addition to the IP and Site)
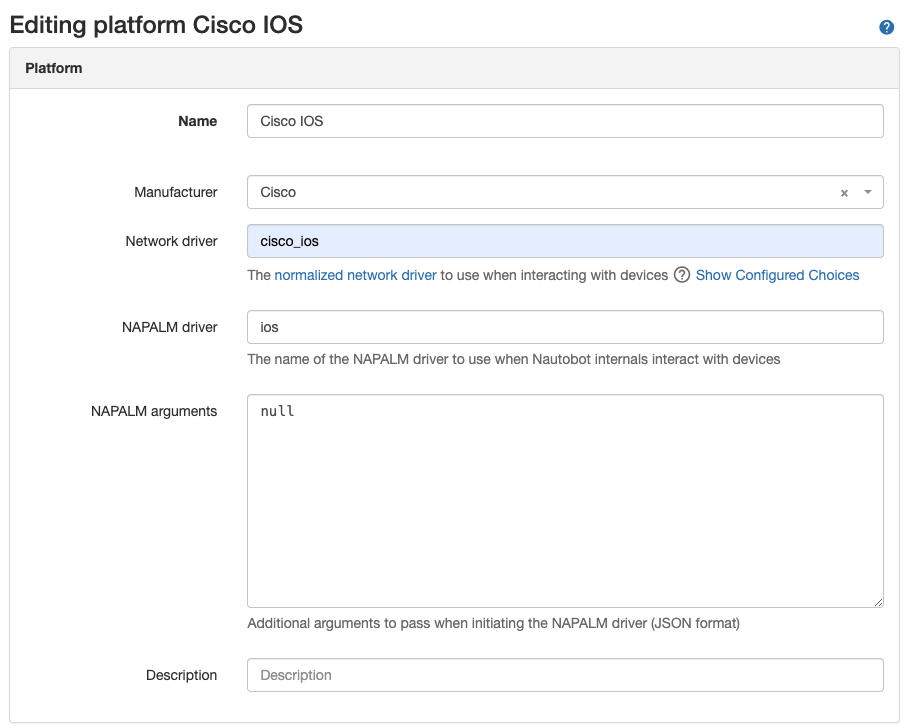
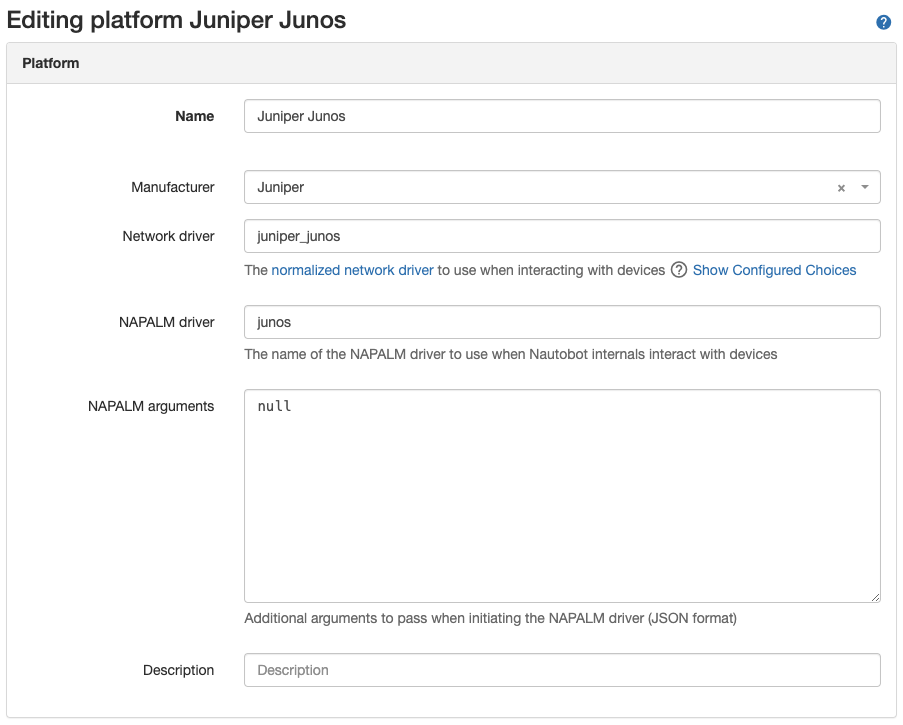
IOS and Junos Auto-Created Platforms
The Onboarding Plugin will automatically create Platforms for vendor operating systems where platform auto-detection works.
The picture below shows the details of auto-created Platforms for cisco_ios and juniper_junos.
Creating a Platform
This section will demonstrate how to create a new Platform in the Nautobot UI. Specifically, it will offer examples for
creating Cisco nxapi and Arista eos Platforms, but the concepts are applicable to any Platform that is manually created.
In the Nautobot dropdown menu, go to Devices--> Platforms--> Add/+.
Define the attributes for the Platform on this screen and click on the 'Create' button.
The Slug value will be auto-populated based on the Platform Name, but you can overwrite that auto-populated value. For the platform to work correctly with this plugin, in many cases you will need to set a specific Slug value for it to work properly.
'Manufacturer' and 'NAPALM arguments' are optional.
Cisco NXOS Platform
A Platform that will work with NXOS devices running the nxapi feature must have specific values for these attributes:
SlugSHOULD becisco_nxos(you may have to overwrite the auto-populated Slug value)NAPALM driverMUST benxos
Arista EOS Platform
A Platform that will work with Arista EOS devices must have specific values for these attributes:
SlugSHOULD bearista_eos(you may have to overwrite the auto-populated Slug value)NAPALM driverMUST beeos
Device Onboarding
Onboard a new device
A new device can be onboarded via :
- A web form
/plugins/device-onboarding/add/ - A CSV form to import multiple devices in bulk.
/plugins/device-onboarding/import/ - An API,
POST /api/plugins/device-onboarding/onboarding/
During a successful onboarding process, a new device will be created in Nautobot with its management interface and its primary IP assigned. The management interface will be discovered on the device based on the IP address provided.
By default, the plugin is using the credentials defined in the main
configuration.pyfor Napalm (NAPALM_USERNAME/NAPALM_PASSWORD). It's possible to define specific credentials for each onboarding task.
Onboarding a Cisco NXOS Device Running the nxapi Feature
When onboarding an NXOS device with the nxapi feature, there are a few requirements:
- The
Portmust be the same value configured fornxapi https porton the Cisco Nexus device - The
Platformmust be explicitly set to be one with the specific parameters in the Cisco NXOS Platform section
Onboarding an Arista EOS Device
When onboarding an Arista EOS device, there are a few requirements:
- The
Portmust be the same value configured for HTTPS on the Arista device - The
Platformmust be explicitly set to be the one with the specific parameters in the Arista EOS Platform section
Consult the Status of Onboarding Tasks
The status of the onboarding process for each device is maintained is a dedicated table in Nautobot and can be retrived :
- Via the UI
/plugins/device-onboarding/ - Via the API
GET /api/plugins/device-onboarding/onboarding/
API
The plugin includes 4 API endpoints to manage the onboarding tasks:
GET /api/plugins/device-onboarding/onboarding/ Check status of all onboarding tasks.
POST /api/plugins/device-onboarding/onboarding/ Onboard a new device
GET /api/plugins/device-onboarding/onboarding/{id}/ Check the status of a specific onboarding task
DELETE /api/plugins/device-onboarding/onboarding/{id}/ Delete a specific onboarding task
Customizing Onboarding Behaviour With Onboarding Extensions
This plugin provides methods to customize onboarding behaviour. By creating onboarding extensions, it is possible to onboard switch stacks, HA pairs and perform other customizations. Please see the dedicated FAQ for device onboarding.
Contributing
Pull requests are welcomed and automatically built and tested against multiple version of Python and multiple version of Nautobot through TravisCI.
The project is packaged with a light development environment based on docker-compose to help with the local development of the project and to run the tests within TravisCI.
The project is following Network to Code software development guideline and is leveraging:
- Black, Pylint, Bandit and pydocstyle for Python linting and formatting.
- Django unit test to ensure the plugin is working properly.
CLI Helper Commands
The project is coming with a CLI helper based on invoke to help setup the development environment. The commands are listed below in 3 categories dev environment, utility and testing.
Each command can be executed with invoke <command>. All commands support the arguments --nautobot-ver and --python-ver if you want to manually define the version of Python and Nautobot to use. Each command also has its own help invoke <command> --help
Local dev Environment
build Build all docker images.
debug Start Nautobot and its dependencies in debug mode.
destroy Destroy all containers and volumes.
start Start Nautobot and its dependencies in detached mode.
stop Stop Nautobot and its dependencies.
Utility
cli Launch a bash shell inside the running Nautobot container.
create-user Create a new user in django (default: admin), will prompt for password.
makemigrations Run Make Migration in Django.
nbshell Launch a nbshell session.
Testing
tests Run all tests for this plugin.
pylint Run pylint code analysis.
pydocstyle Run pydocstyle to validate docstring formatting adheres to NTC defined standards.
bandit Run bandit to validate basic static code security analysis.
black Run black to check that Python files adhere to its style standards.
unittest Run Django unit tests for the plugin.
Questions
For any questions or comments, please check the FAQ first and feel free to swing by the Network to Code slack channel (channel #networktocode). Sign up here
Screenshots
List of Onboarding Tasks

CSV form to import multiple devices

Onboard a single device

Menu

Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file nautobot-device-onboarding-1.1.1.tar.gz.
File metadata
- Download URL: nautobot-device-onboarding-1.1.1.tar.gz
- Upload date:
- Size: 754.9 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.1.8 CPython/3.6.7 Linux/4.15.0-1077-gcp
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2ac8872815a68c40b6dfa915f39562810ec6310fae7e641c252627483b0cc99c
|
|
| MD5 |
e4bf0740f8a8fb356d52ab0420b832a3
|
|
| BLAKE2b-256 |
d2174e82bd63c806743d5da1129a9494f24435b5732fb41a8bab0fd259069a72
|
File details
Details for the file nautobot_device_onboarding-1.1.1-py3-none-any.whl.
File metadata
- Download URL: nautobot_device_onboarding-1.1.1-py3-none-any.whl
- Upload date:
- Size: 777.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.1.8 CPython/3.6.7 Linux/4.15.0-1077-gcp
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e041a50030ded41541b4609fb15fae59ef6b657bab9bd94c3ef3321dc9334acb
|
|
| MD5 |
3e8a66c96cbc26273743f3ab61bc7086
|
|
| BLAKE2b-256 |
604dcd0a3ff0a60f98e2ece8d4ae99918967de5a9d3250d0b2a407dd16bddeec
|







